
Control has been a interdisciplinary branch of engineering essential to robotics. In 1980, Oussama Khatib proposed the operational space formulation, which avoids controlling robots joint-by-joint and instead formulates the robot dynamics, performance analysis, and control in the very space where the task is specified. When used with an accurate inertial dynamic model, this method solves the problem of joint motion coordination across multiple tasks for highly articulated robots.
Simulation on the other hand, focuses on recreating a physical scene with one or more articulated bodies, a static world and various actuators & sensors. When experimenting with real robots, one should have a measure which determines if the experiment is both reasonable and safe. Simulation plays this crucial role to validate experimental techniques before expensive physical realizations. In order for simulation to be realistic, it has to take into account many different factors, such as friction, collisions, and system nonlinearities.
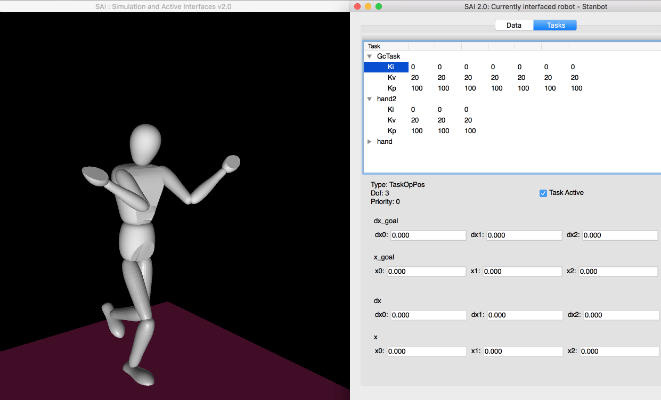
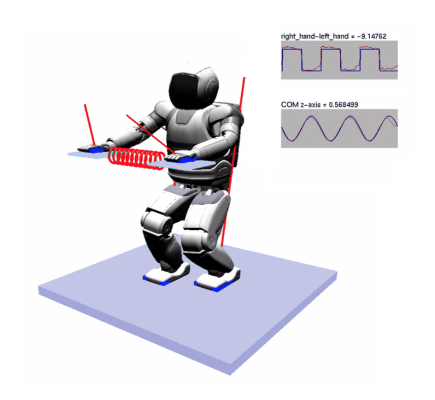
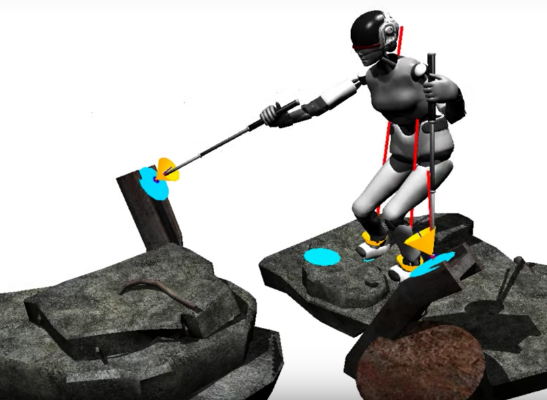
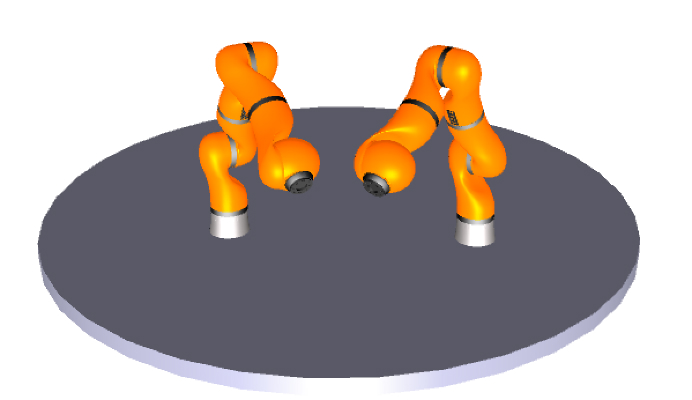
We developed the Simulation and Active Interfaces (SAI) open source framework to meet the need to integrate control and physically realistic simulation under one umbrella. The framework comprises of two modules: a control library that implements the whole-body operational space control and a real-time dynamics engine with multi-point articulated body collision/contact resolution. SAI aims at creating a common software framework for teams working on manipulation, robotics, robotic simulation and associated areas. The result is a robot-agnostic robot control and testing platform that allows smooth run-time change in the robot's behavior, detailed interaction through haptic/UI interfaces and efficient realistic simulations of complex environments.