Haptic fMRI:
Haptic Functional Magnetic Resonance Imaging
We're enabling neuroscientists to study how the brain represents complex tasks
Haptic fMRI is a novel research technique that uses advanced haptic rendering and workspace compression algorithms to simulate day-to-day tasks in confined MRI scanner workspaces. Our primary focus in this project is to develop a haptic framework for neuroscience experiments that consists of an fMRI-compatible haptic interface, fMRI scanning protocols, and real-time haptic rendering algorithms.
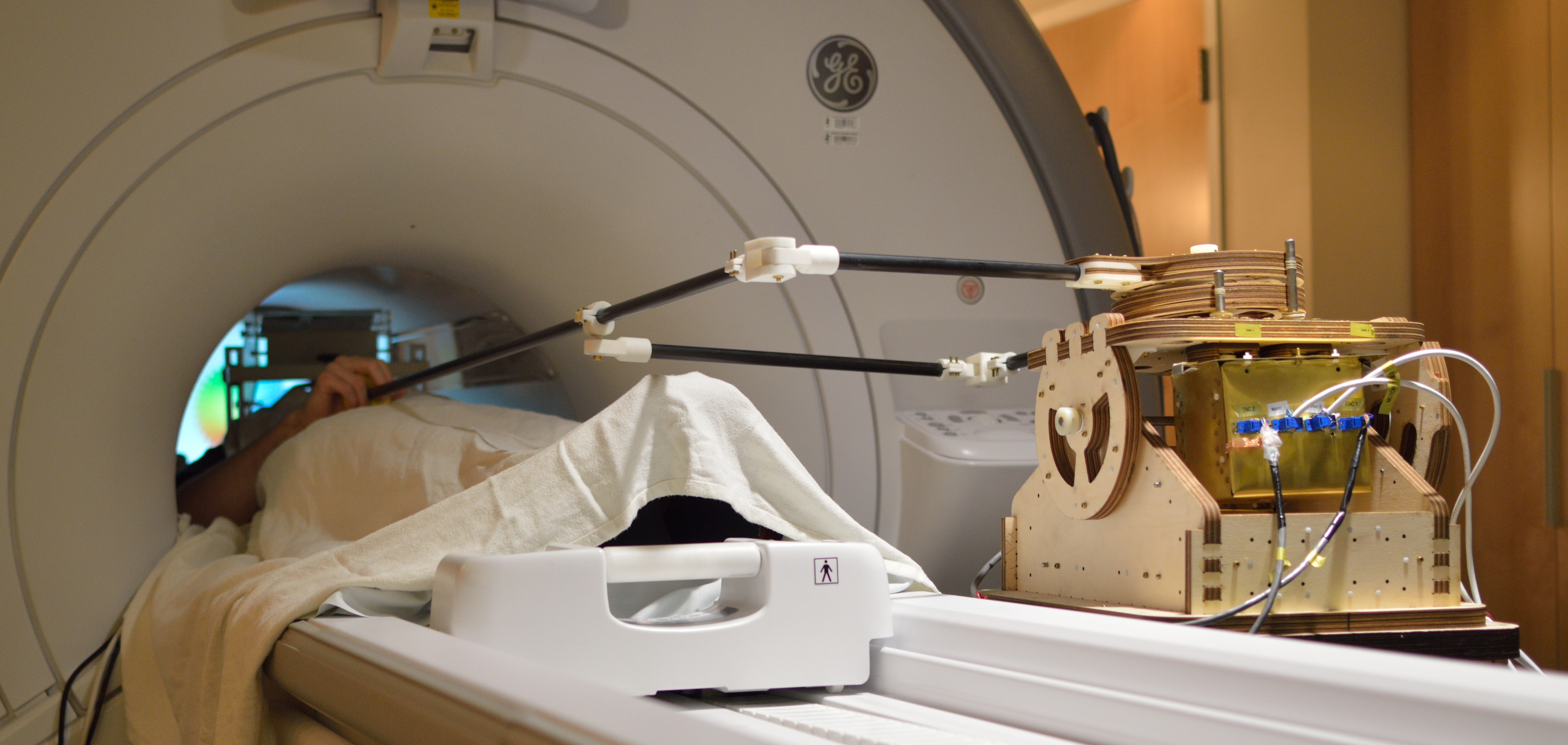
HFI: Haptic fMRI Interface
A novel three degree-of-freedom fMRI-compatible haptic device
We recently developed a novel experimental platform, Haptic fMRI Interface (HFI), to enable neuroimaging experiments that study how day-to-day manipulation tasks map on to the brain. Users manipulate a haptic interface while being immersed in an interactive virtual simulation. The haptic interface simulates physical interaction by applying appropriate forces whenever users touch and feel virtual objects. HFI can support a variety of structured motor tasks, and thus overcomes traditional constaints on motor control fMRI experiments.
The key insight in designing motor neuroscience experiments is that experiments must probe how the brain resolves the under-constrained inversion of low dimensional task specifications into high dimensional actuator commands. Moving a hand, for instance, involves specifying a three translation variables, which must be mapped into control signals for fifty muscles. Our human biomechanical model controllers can predict what real-world motions induce large gradients in the the neuromuscular actuation space, and HFI allows us to perform these potentially complex motions in a structured manner. These experimental methods set the stage for experiments to map human motor coordination.






