Human Friendly Robot Design
Designing next generation robots that work closely with humans
Human friendly robot design is an emerging field of robot design involving robots that closely interact with humans. These robots include surgical robots, wearable robotic suits and manufacturing robots. The main focus in the development of human friendly robots is safety, more specifically, how can robots be sufficiently powerful, precise and dexterous to do useful work while also being inherently safe for physical interaction?
Robots have traditionally relied on powerful and highly geared electromagnetic actuators, which offer excellent controllability. However, these actuators are usually paired with large transmission ratios to achieve acceptable power/weight ratios. With large transmission ratios, the actuators reflect large inertias that may result in severe injury in the event of unforseen collisions with the human operator.
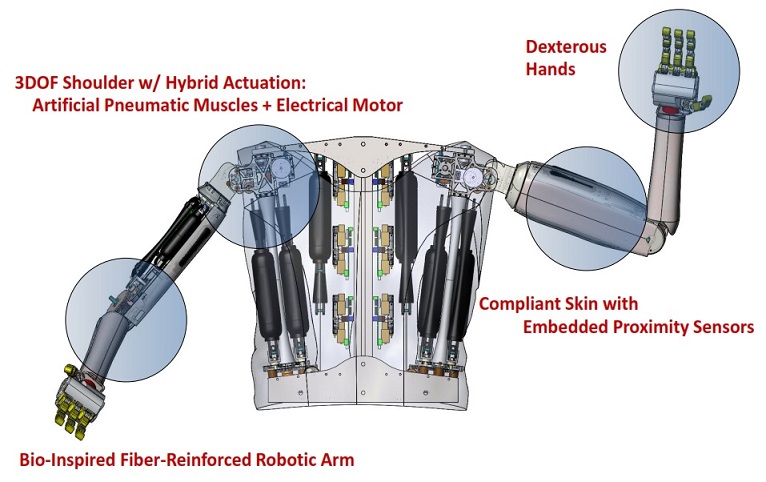
During the past several years, our group decided to revisit existing robot technologies and to explore new ways of actuation techniques to overcome the safety and/or performance limitations. Our efforts resulted in a dual actuation scheme that combines different actuators at the same joint that works in a complementary manner. We proposed to couple in parallel a powerful but elastic macro-actuator with a low-powered but highly responsive mini-actuator. Due to the natural dynamics of these macro-mini actuators, they operate in a frequency-partitioned manner. The resultant system is one that is safe, powerful and responsive.
Hybrid Actuation Approach
Pneumatic actuators and DC motor co-actuation
Pneumatic McKibben actuators provide high power and force density and inherently low mechanical impedance. However, the underlying nonlinear compressible gas dynamics involved make precise control difficult. By combining them with small electromagnetic actuators we were able to achieve a 10-fold reduction in effective inertia while maintaining high-frequency torque capability.
The combination of two different actuation technologies comes at the expense of complexity in comparison to traditional robot design. In order to effectively manage these complexity and achieve a desired goal, we proposed design methodologies regarding mini actuator selection and sizing. Conducting comparative studies of hybrid actuations using different mini actuations, we have developed criteria and algorithms in order to determine mini actuator type and size, while minimizing interference between two different actuators and reducing effective inertia.
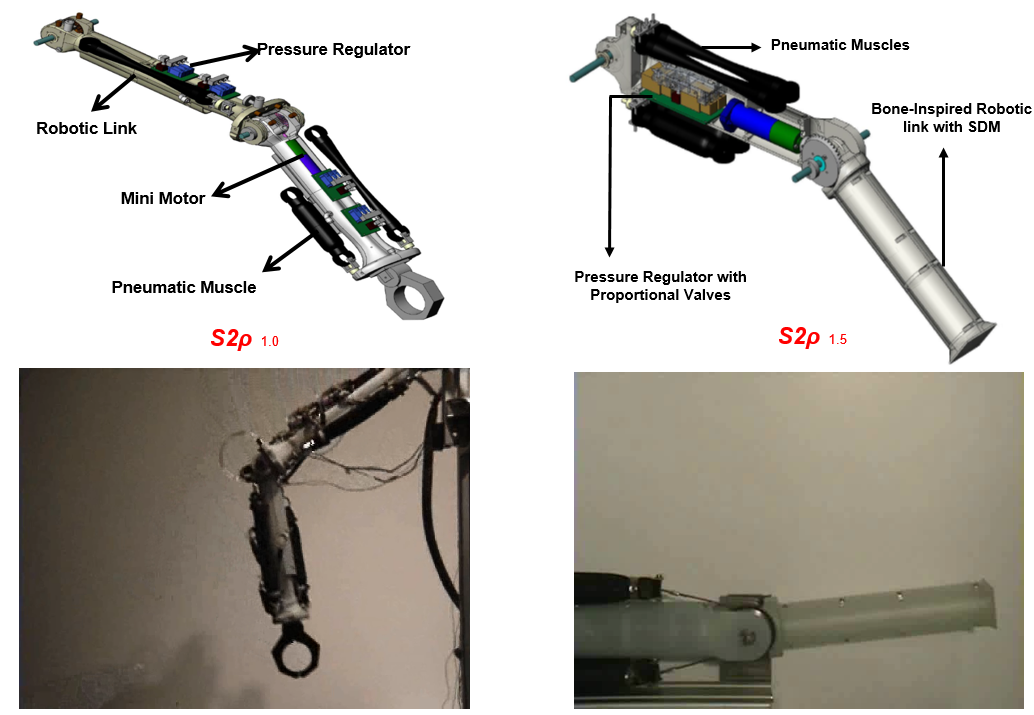
For further improved performance and safety, we developed novel mechanisms such as integrated pressure regulators, bio-inspired robotic arms using Shape Deposition Manufacturing, variable radius transmission for artificial pneumatic muscles and centrifugal force-based passive brakes