Humanoid Robotics
Develping Generalized Multi-Task Control Framework of Humanoids
Humanoid robots are supposed to coexist with human and work in our daily environment. They can be used to assist and communicate with us in our homes, offices, public spaces, hospitals, disaster areas, etc. When the robot moves in our environment, safety is one of the most important key problems. In the actual environment, multiple contact and unpredictable contact happen between the robot and the environment or between the robot and human. If these contacts are not modeled in the motion controller of the robot, it causes instability of balance and motion control tasks. In this point of view, compliant and robust contact and motion control is important for humanoid robots. One approach for addressing this problem is to provide torque control. The input torque for the system can be designed to compensate for dynamic effect of the system. Decoupled task dynamics can be applied by the Operational Space Formulation which provides the robot with higher performance in position tracking as well as in compliant motion.
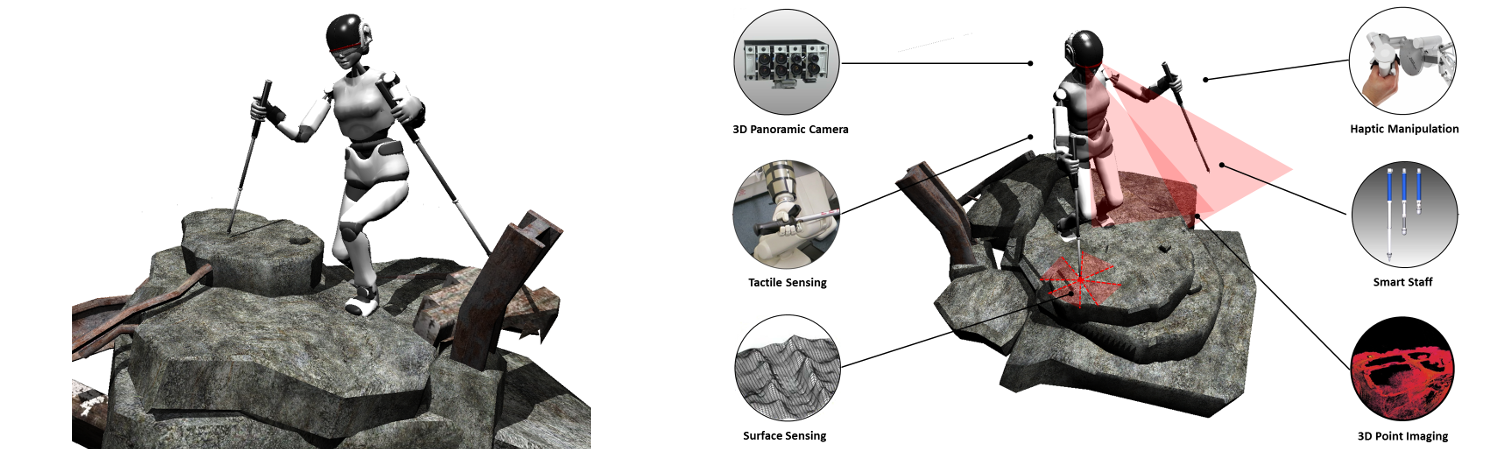
SupraPeds: Contact-Supported Locomotion
A novel concept of humanoid control platform in 3D rough terrains
Maintaining humanoid robot stability in unstruetured environments is nontrivial because robots lack human-like tactile sensing and require complex task-specific controllers to integrate information from multiple sensors. To deploy humanoid robots in cluttered and unstructured environments such as disaster sites, it is necessary to develop advanced techniques in both locomotion and control. We proposed to incorporate a pair of actuated smart staffs with vision and force sensing that transforms biped humanoids into tripeds or quadrupeds or more generally, SupraPeds. The concept of SuprePeds not only improves the stability of humanoid robots while traversing rough terrain but also retains the manipulation capabilities.
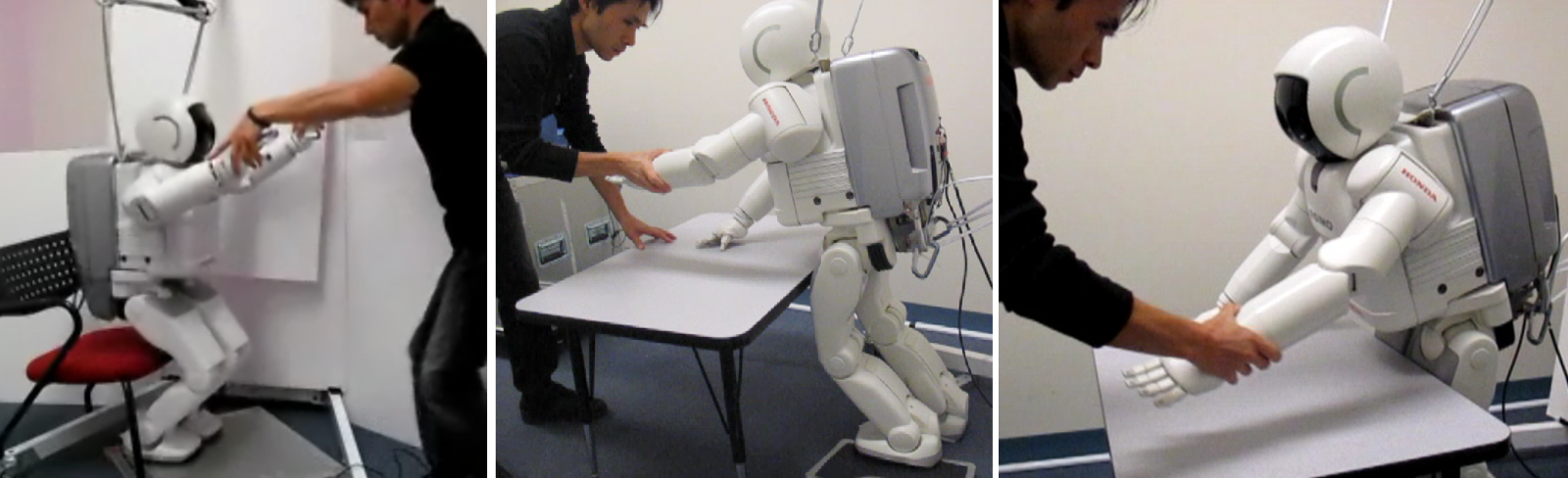
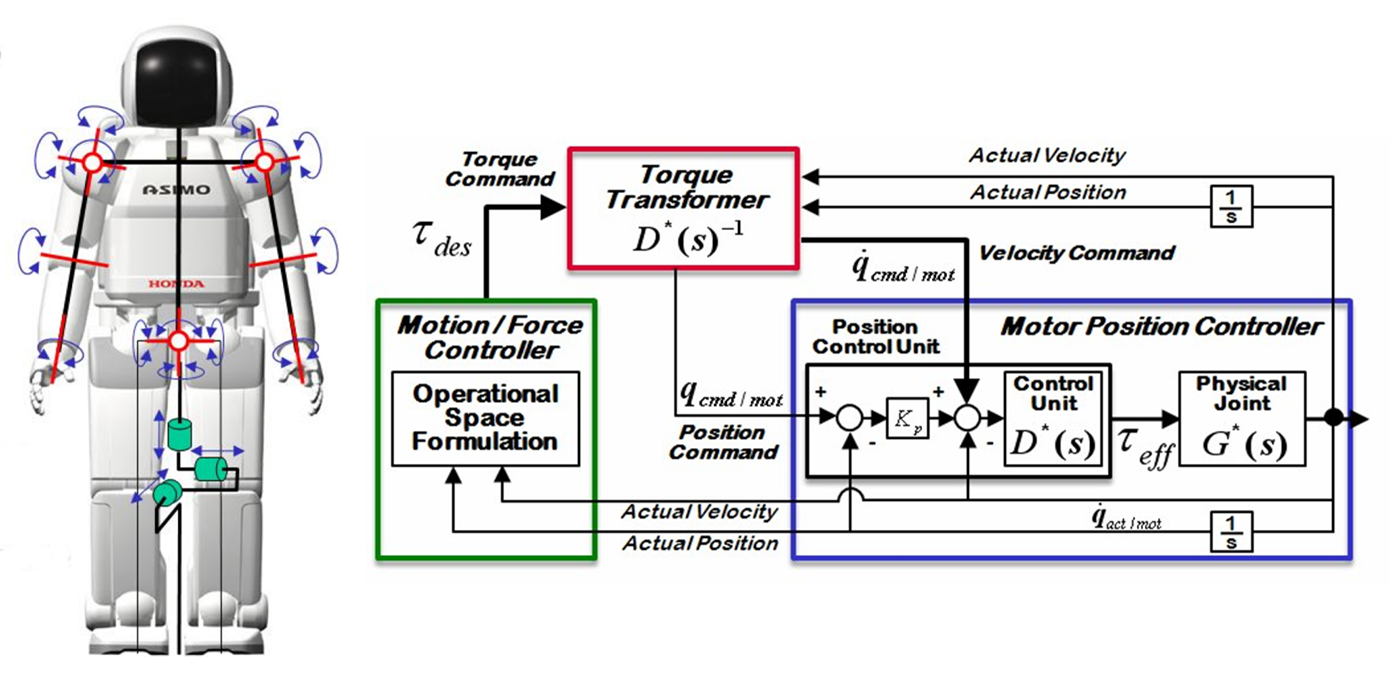
Compliant and Passive Whole-Body Control
Compliant and passive motion control is one of the key technologies for the humanoid robot. In this project, the Torque Transformer is applied to control the existing position controlled system by torque command and to compensate dynamic effect of the system in the motion contrl. Dynamic effect of the robot is modeled by the Operational Space Formulation. The torque command from the Operational Space Formulation is transformed into the joint position and the velocity command through the Torque Transformer.
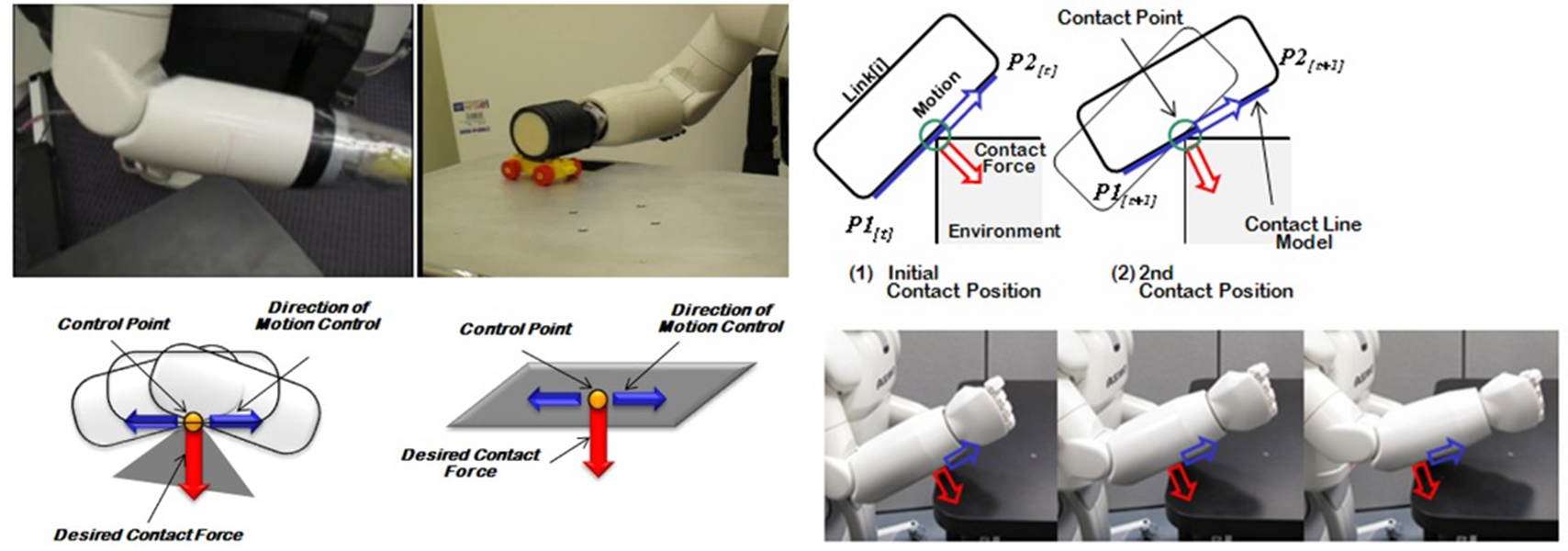
Multi-Contact Force Control
Active Observer, AOB was applied to achieve adaptive force control for each translational direction. AOB was designed to handle the uncertainties of contact with the environment using the force sensor at the end-effector. Haptic tele-operation allows an operator to control a slave robot using a master device through which the operator can feel the remote environment of the slave robot.