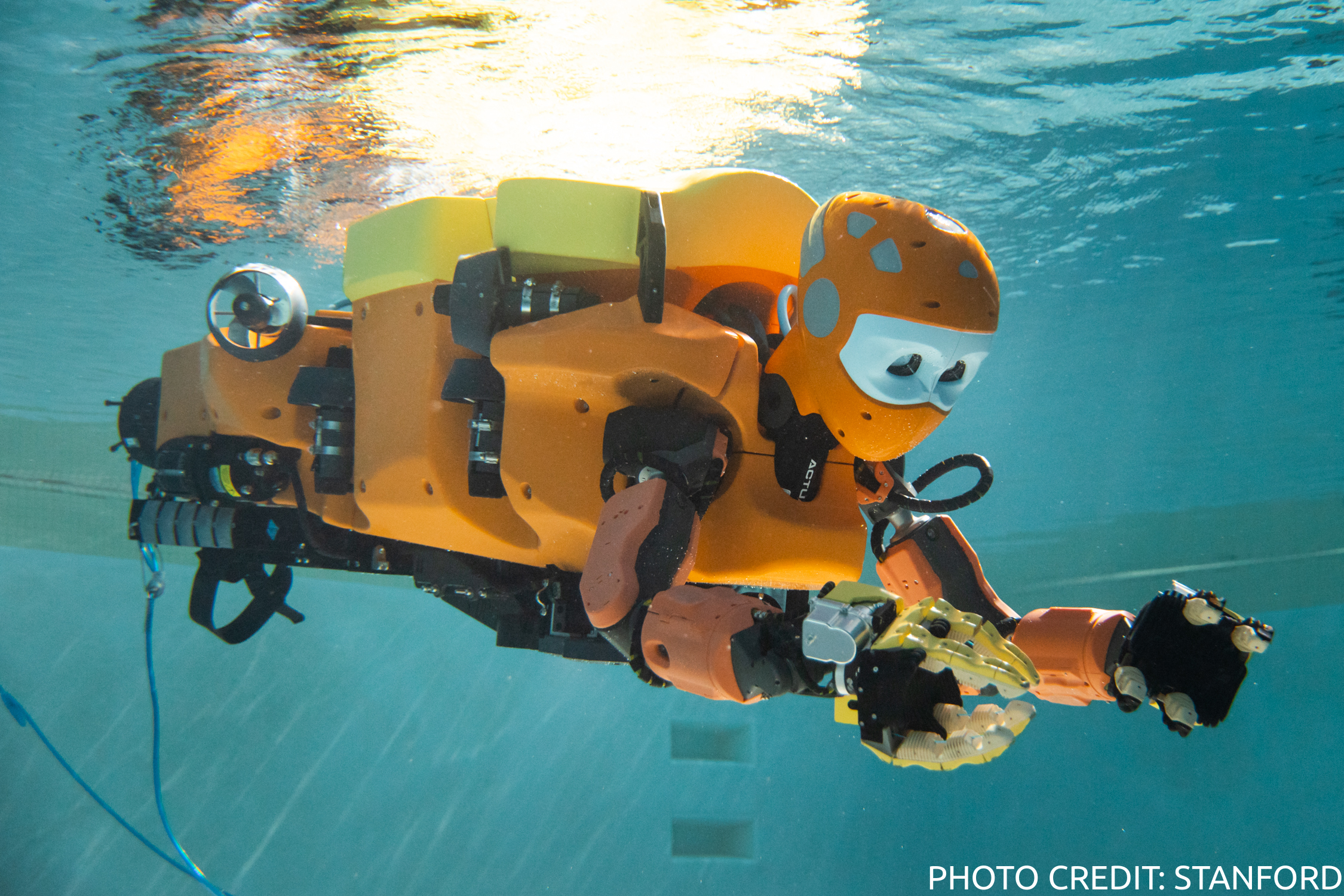
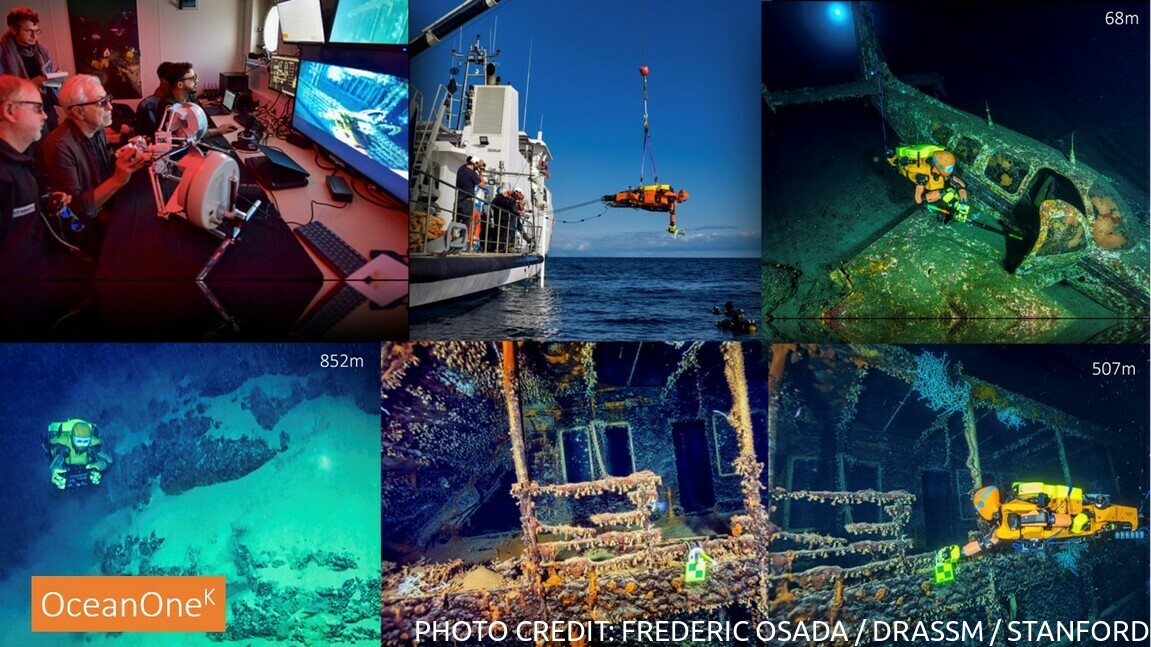





OceanOneK is the newest generation of underwater humanoid robot designed for deep sea exploration with bimanual manipulation, stereo vision, and human-robot haptic interaction capabilities. With a maximum depth of 1000 meters, the robot can reach sites considerably deeper underwater than OceanOne, enabling it to explore a wider variety of aquatic ecosystems. Through haptic feedback, OceanOneK (O2K) allows researchers to interact with underwater environments and flexibly operate with tools and equipment. Following testing at Stanford, OceanOneK embarked on several missions in 2022 at La Ciotat, off Côte d'Azure, Bastia off Corsica, and Cannes, including the wrecks of a P-38 aircraft at 40 m, a Beechcraft Baron F-GDPV at 67 m, the submarine Le Protée at 124 m, a Roman shipwreck in Aléria at 334 m, and the Francesco Crispi passenger ship at 507 m. For its final mission, OceanOneK performed a deep dive to 852 m off the coast of Cannes - the first time a humanoid robot had reached such depths touching the seafloor.
Team
The team, led by Oussama Khatib, included Harlyn Baker, Manuel Barbarossa, Mitchell Barham, Antonio Bicchi, Manuel Catalano, Tracy Chen, William Chong, Franca Cibecchini, Vincent Creuze, Mark Cutkosky, Denis Degez, Chinmay Devmalya, Elena Galbally, Shameek Ganguly, Wesley Guo, Mikael Jorda, Bo Kim, Michel L'hour, Domenico Mura, Adrian Piedra, Wilson Rutolo, Rachel Thomasson, and Steve Weiss.
Stanford Pool
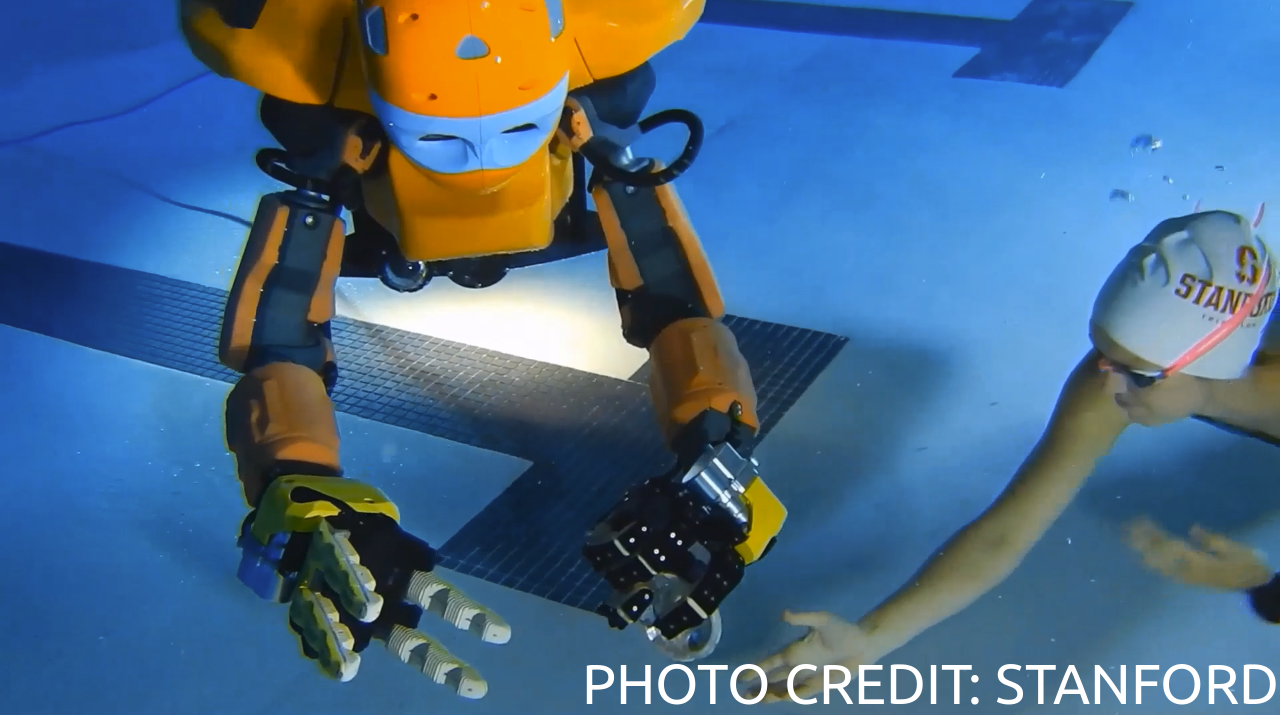
Experiments with OceanOneK were performed at the Stanford AOERC Avery Pool. Navigation, bimanual manipulation, whole-body control, and vision algorithms were validated in an improvised shallow water environment. After rigorous testing, OceanOneK was ready for the Mediterranean depths.

O2K in the pool
Grasping with O2K's underactuated, 4-fingered hand
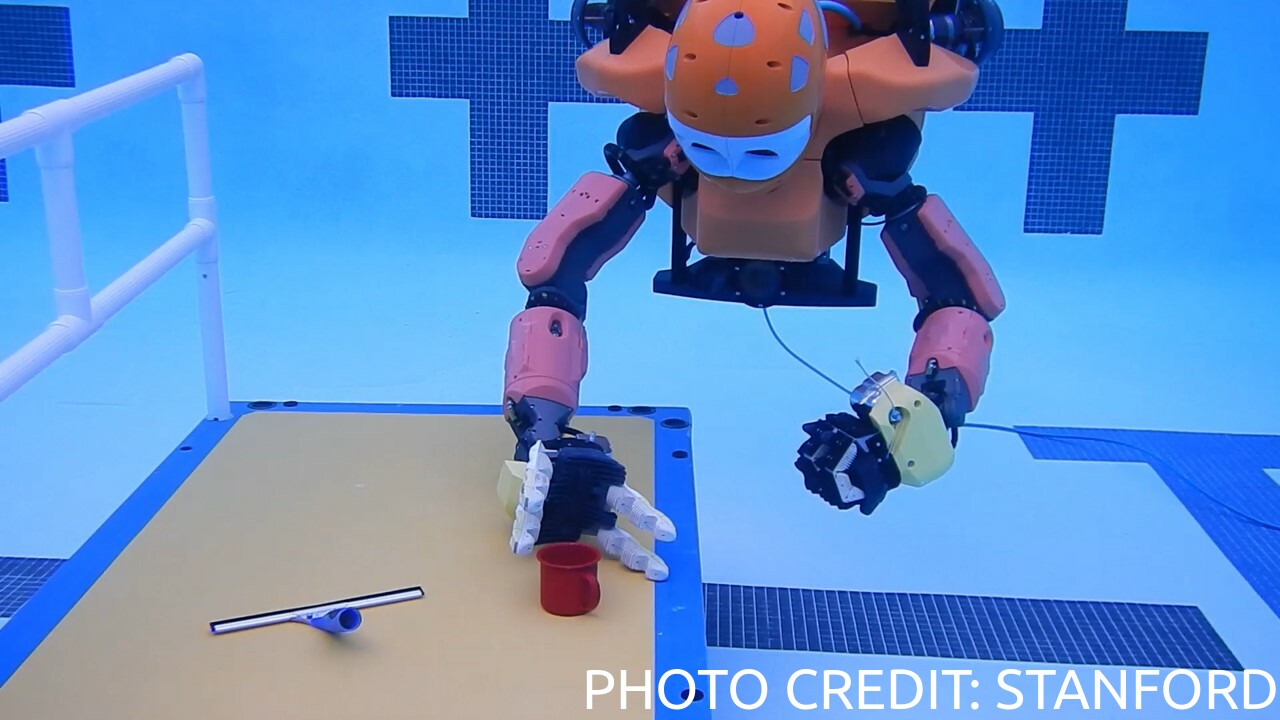
O2K grasping a cup on an underwater platform

Performing bimanual manipulation

Receiving an object delivered by O2K

Guidance through haptic interaction
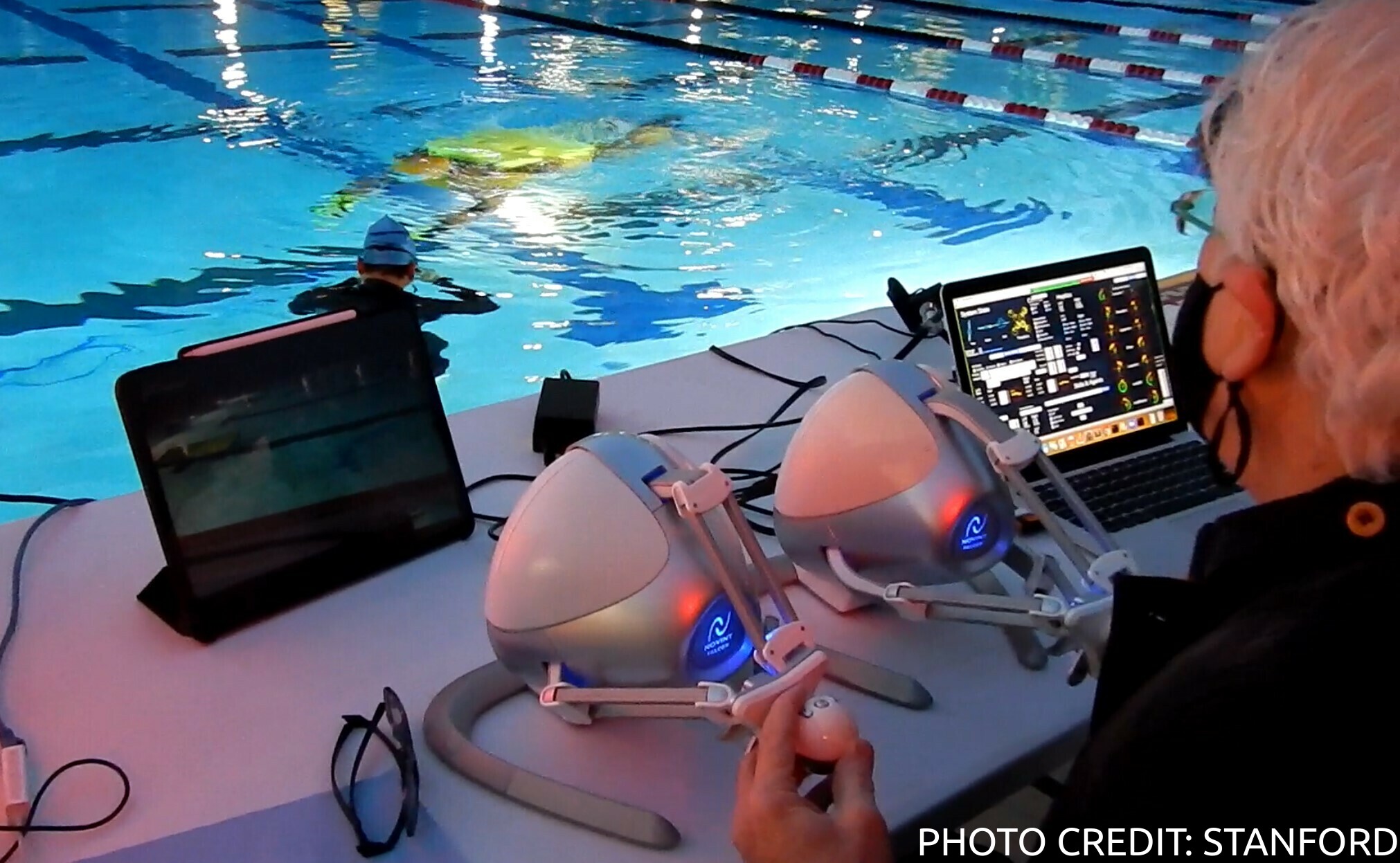
Haptic, vision, and navigation control setup
Alfred Merlin
The Alfred Merlin is the science vessel that served as the team's base during missions. The new underwater archaeological research vessel of the Drassm was launched in 2021, enabling robots onboard to reach depths of up to 2500 meters.

Alfred Merlin

Lifting O2K

Positioning O2K over the water

Hillarion, O2K's companion ROV, being lifted

Performing maintenance on O2K
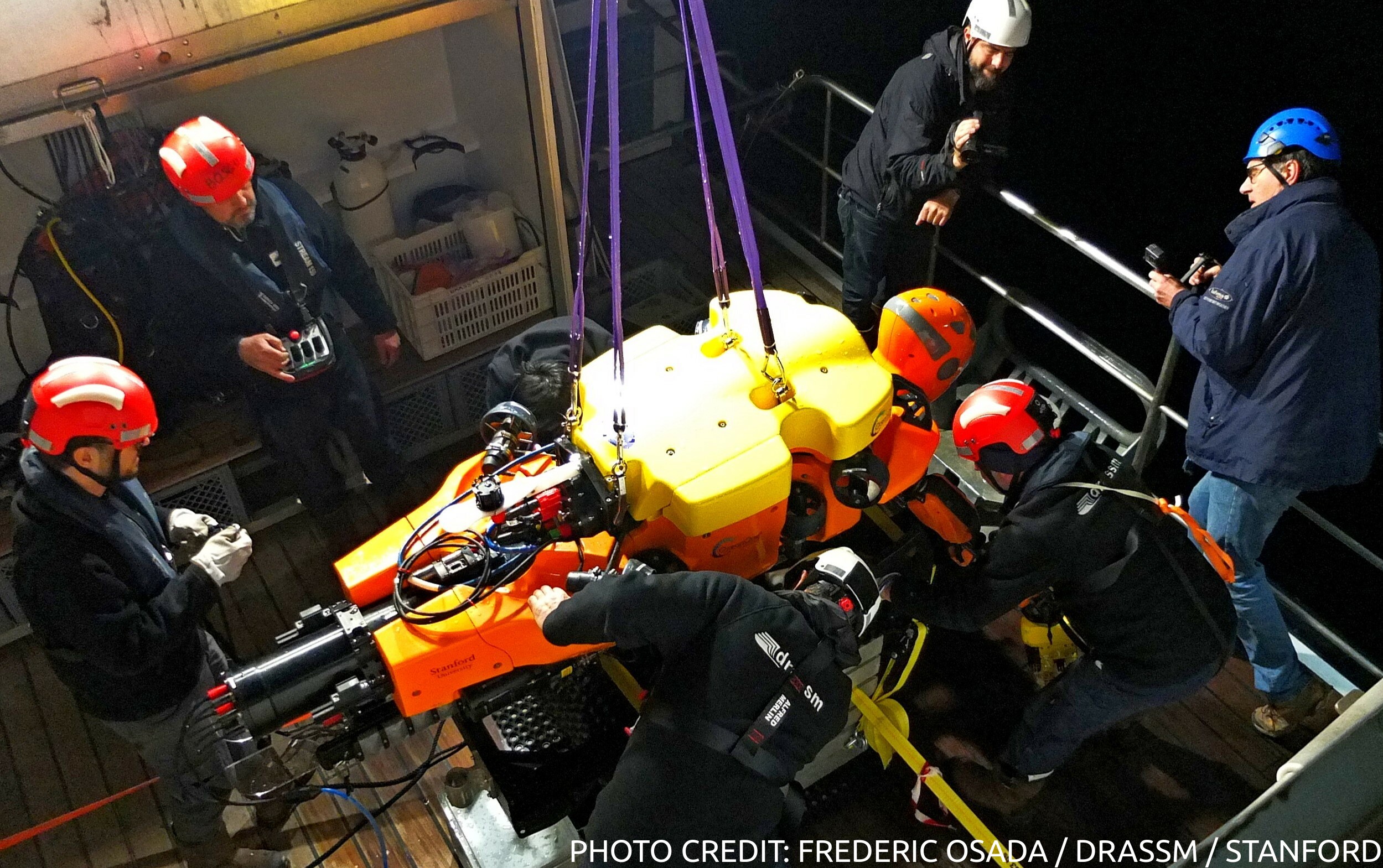
Deploying O2K at night
La Ciotat
P-38 Lightning
The Lockheed P-38 Lightning is an American single-seat, twin piston-engined fighter craft used extensively in WWII. O2K explored a P-38 plane wreck found in excellent condition at shallow depths off La Ciotat.

O2K inspecting the P-38 from overhead

O2K inspecting the plane's tails

Haptic guidance during exploration

O2K's right eye view showing interaction with a propeller
Protée
Protée was a French Navy submarine launched in July of 1930. Assigned to the 3rd Submarine Division based in Toulon, it carried out several patrol missions in the Mediterranean during WWII. Protée disappeared in December of 1943, and its wreck was discovered in April 1995 by a Rémora 2000 oceanographic submarine.


O2K using a tool to probe Protée's surface
Bastia, Corsica
Aléria
Bastia is a city in the Haute-Corse department of France on the island of Corsica. A Roman shipwreck dating back to the 2nd century AD was discovered off the nearby town of Aléria in 2012. At the site, the ship's inventory was strewn across the seafloor, including many unique vases and lamps.

Archaeological artifacts at the shipwreck site

O2K navigating the shipwreck site

O2K grasping an oil lamp

Close-up view of O2K grasping for an oil lamp

A 200 AD Roman oil lamp from the seafloor

A 200 AD Roman vase from the seafloor
Francesco Crispi
The Francesco Crispi was a passenger ship adapted to troop transport during WWII. It was sunk by the submarine HMS Saracen in April 1943 near Elba Island. The shipwreck has transformed into an aquatic ecosystem populated with corals and sea life.

Coral growth on the Crispi
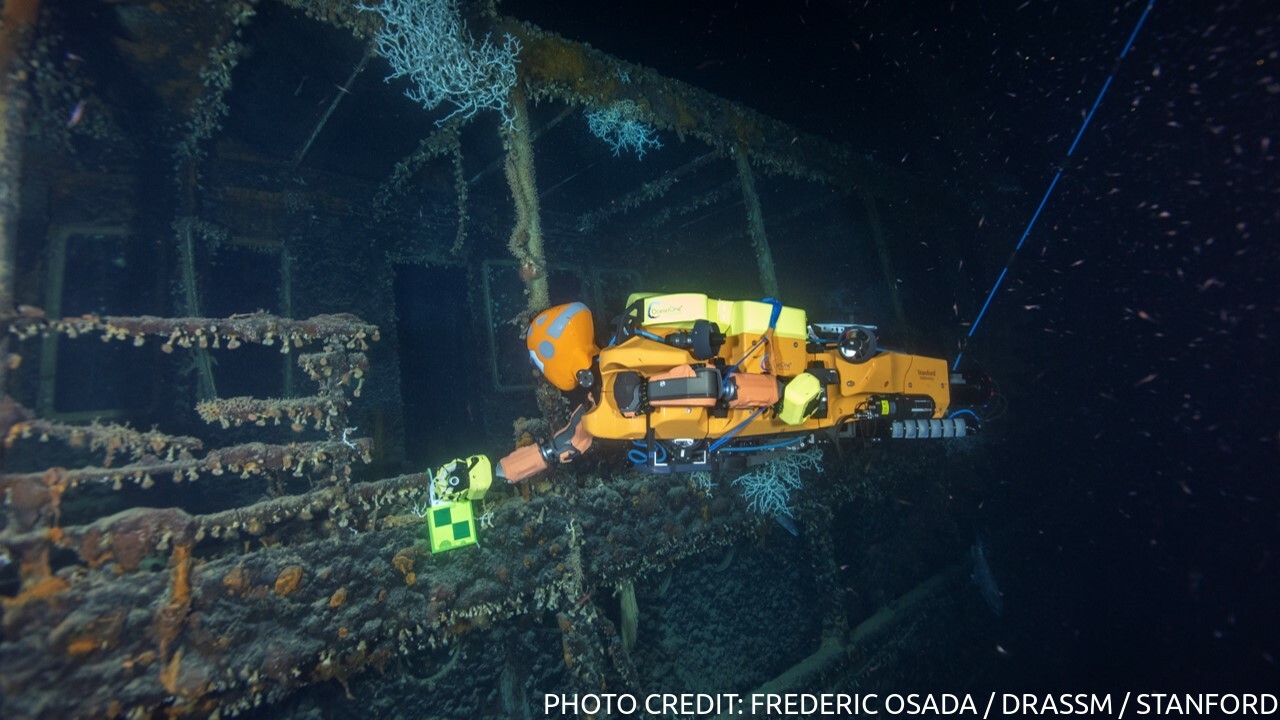
O2K placing a reference measurement marker

O2K inserting the boom camera in a crack in the ship's hull

O2K recording video of the deck
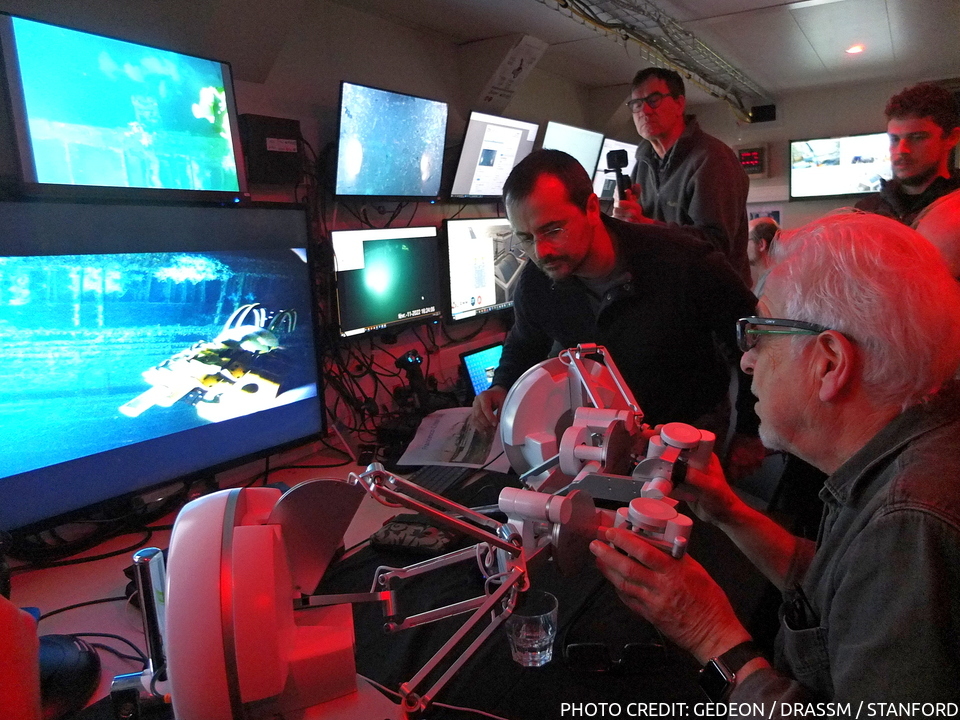
Haptic guidance control room
Cannes
Beechcraft Baron F-GDPV
The Beechcraft Baron F-GDPV is a light twin-engined piston aircraft designed and produced by Beechcraft. The aircraft was introduced in 1961, with newer versions remaining in production through to today. Found intact near Théoule-sur-Mer, this aircraft's excellent condition made it suitable for aquatic exploration.

O2K inspecting the aircraft from above

O2K inspecting the aircraft's tail

O2K maneuvering with the boom camera

O2K investigating the cockpit with the boom camera
Deep Dive
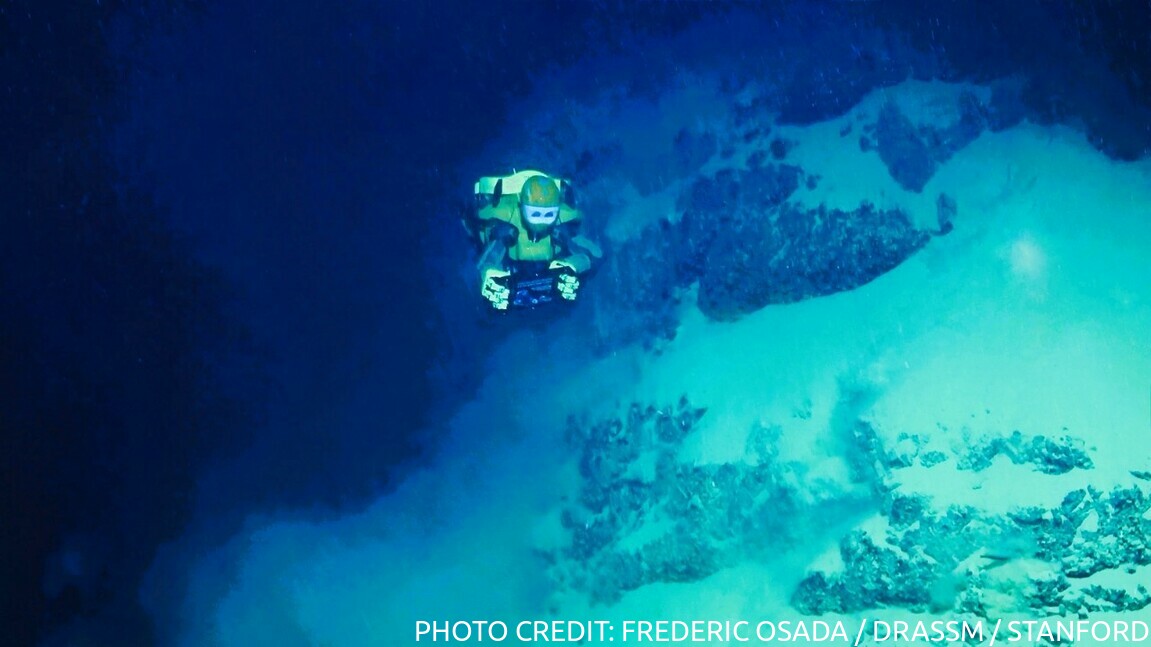
A deep dive to the seafloor at 852 meters was performed to mark OceanOneK's significant engineering accomplishment. On this dive, it placed a ceremonial plaque marking the first human "touch" of the seafloor at such depths through a humanoid robot. The plaque was placed then recovered, and brought back to the surface.

O2K diving with the plaque

O2K placing the plaque on the seafloor
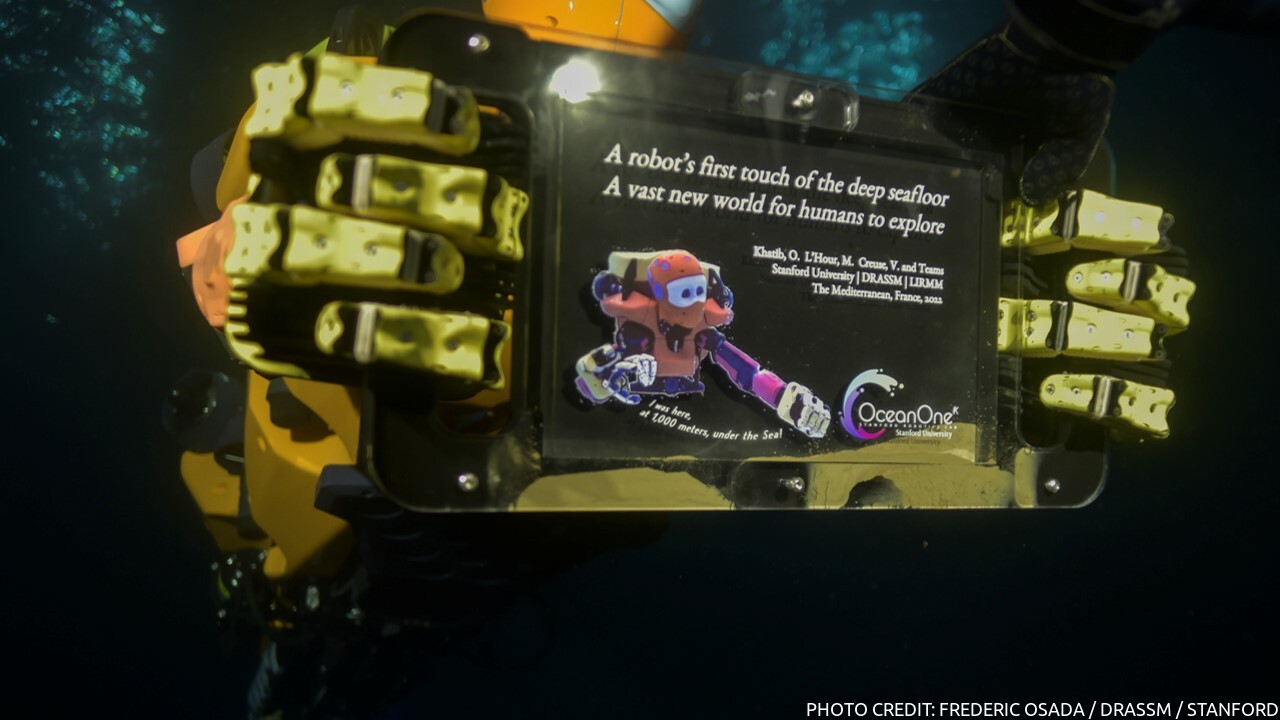
O2K displaying the recovered plaque with sand from the seafloor

News and Media
US
-
Stanford News
Stanford's OceanOneK connects human's sight and touch to the deep sea
-
CNN
Humanoid diving robot explores shipwrecks on the bottom of the ocean
-
WIRED
Why a Diving Robot Can Replace Scuba Divers (Video)
Tech Times
Stanford Scientists Create 'OceanOneK' - A Humanoid Robot That Can Dive In Ocean Depths!
IOT World Today
Humanoid Robot Explores Shipwrecks
Tech Xplore
Underwater robot connects humans' sight and touch to deep sea
Interesting Engineering
OceanOneK has managed to reach depths of close to 1 km
France
India
Mexico
Robb Report
CONOCE A OCEANONEK, EL ROBOT BUCEADOR QUE REVELARÁ LOS SECRETOS MÁS PROFUNDOS DEL MAR
Info Channel
I.O. Qué Sé 30: OceanOneK, el robot explorador de océanos
Peru
Colombia
© Stanford University, Stanford, California, USA. 94305.
Monochromed template from HTML5Templates