
Humanoid Robotic Control

My research in robotics focuses on novel control architectures, algorithms, sensing, and human-friendly
designs for advanced capabilities in complex environments. With an emphasis on enabling robots to
interact cooperatively and safely with humans and the physical world, these studies bring understanding
of human movement for therapy, athletic training, and performance enhancement. This work on understanding human cognitive task representation and physical skills is enabling transfer for increased
robot autonomy. With these core capabilities, we are exploring applications in healthcare and wellness,
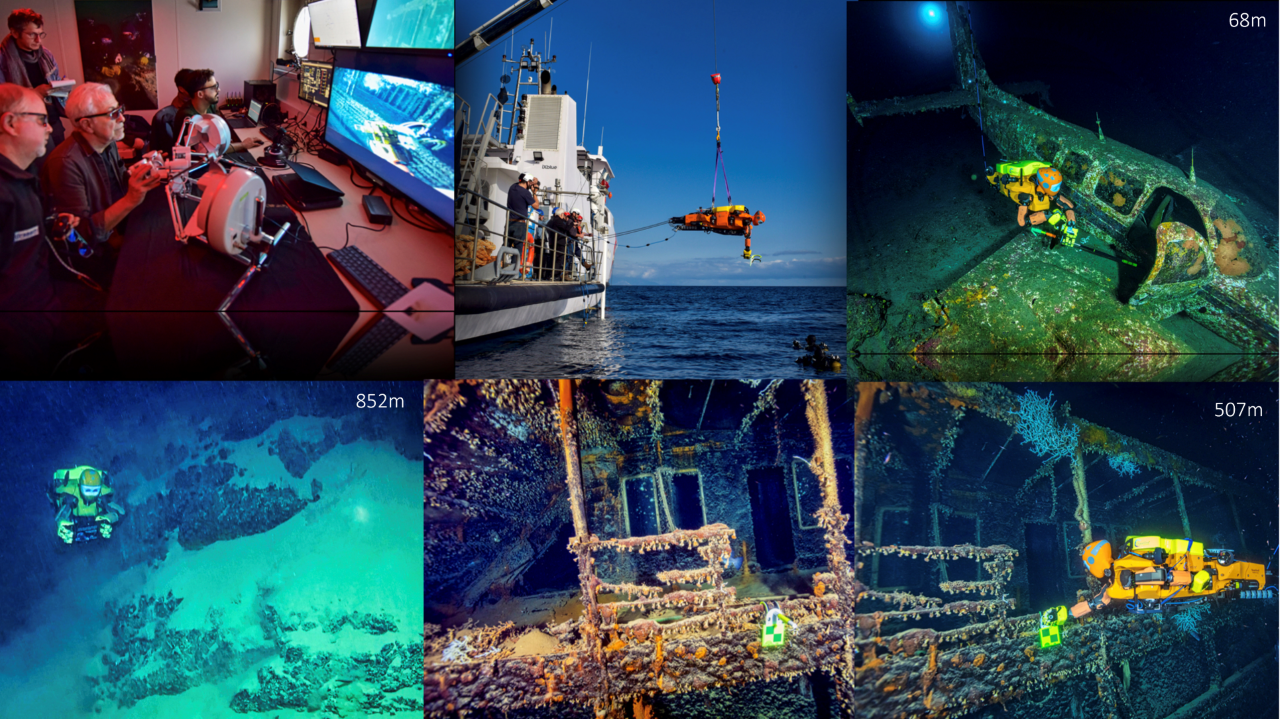
industry and service, farms and smart cities, and dangerous and unreachable settings – deep in oceans,
mines, and space.

Humanoid Robotic Control
Human Friendly Robotics
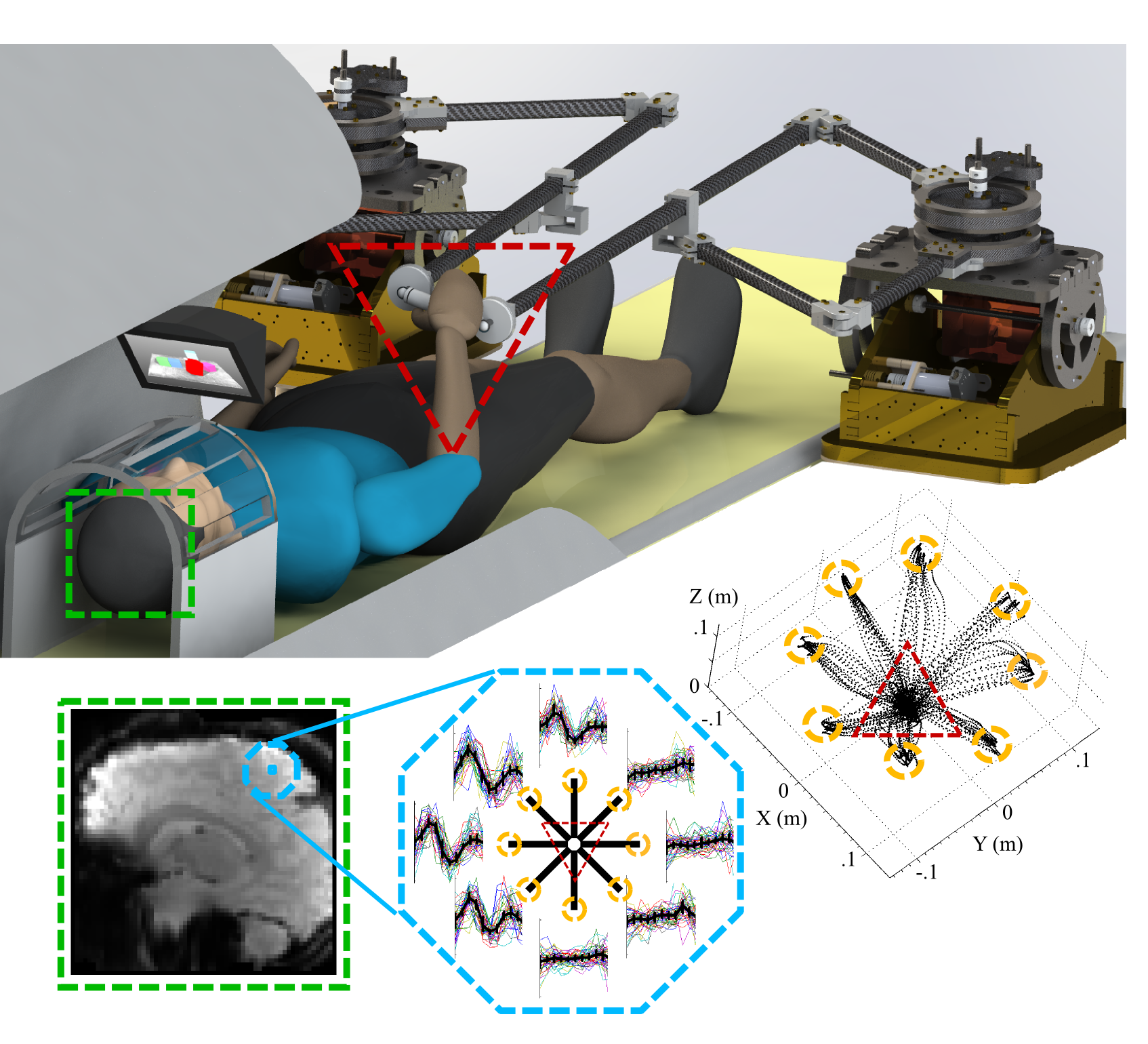
Haptic fMRI
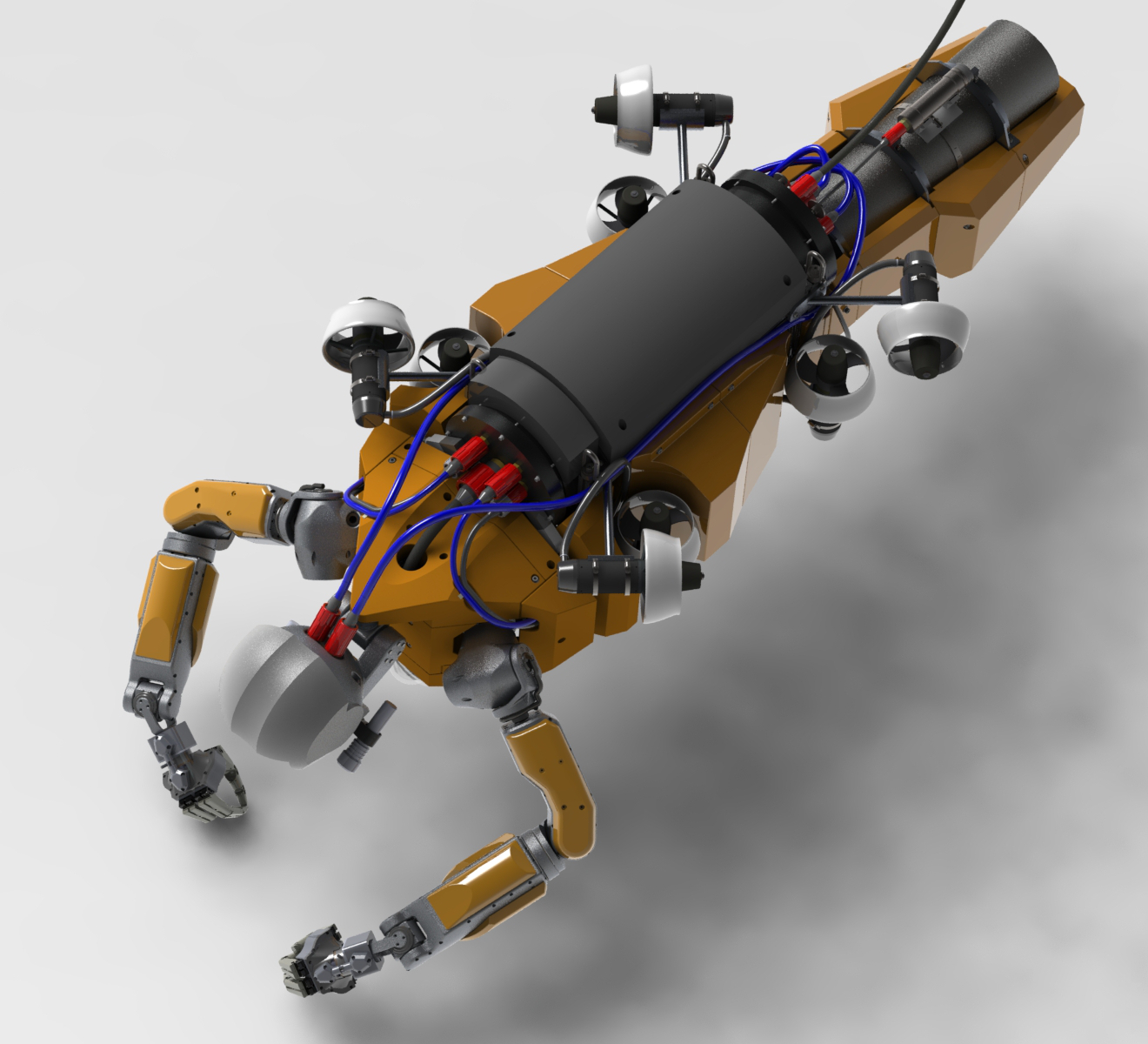
The Red Sea Robotic Exploratorium
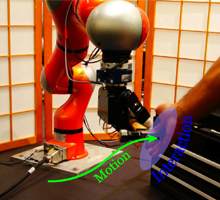
Learning Motion & Interaction
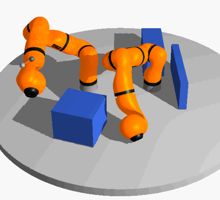
Control & Simulation

Haptics and Teleoperation
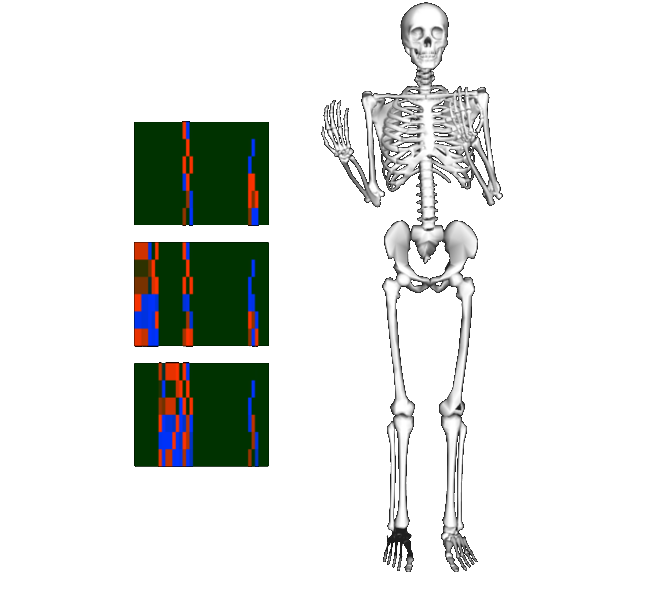
Human Biomechanics
© Stanford University, Stanford, California, USA. 94305.
Monochromed template from HTML5Templates